欢迎来到中南大学智能学习与优化实验室
LOCATION:HOME >> PROJECT >>智能机器人
(七)智能机器人
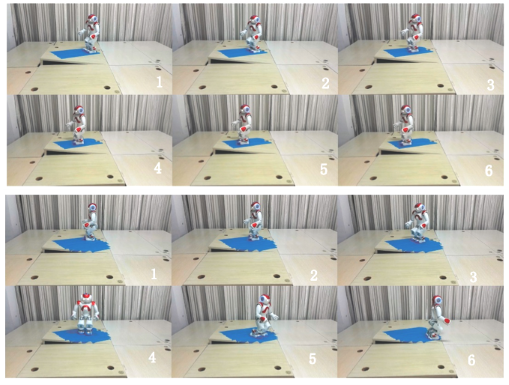
提出了一个基于神经网络的Matsuoka CPG仿生模型潜能提升框架,设计了人形机器人NAO的仿生控制系统,首次展示了人形机器人NAO在连续变化斜坡上的自适应行走。
针对视角变化和环境条件变化,提出了一个基于卷积神经网络的鲁棒图像序列框架,在所提出的框架下,人形机器人NAO在极端环境变化中具有更高的地点识别准确率和召回率。

针对演示学习中训练集质量无法保障的问题,提出了一个基于教师辅助的训练集质量改进方法,在所提出的方法下,人形机器人NAO具备较高的人体动作模仿性能。

提出了一个基于语义相关注意机制的多阶多尺度特征融合模型,首次学习到了人体各部位和运动时间之间的语义相关性,提高了人体动作预测精度。

发表IEEE Transactions论文5篇。